Aayush pursued his bachelor’s studies at VIT University (India), obtaining a degree in Mechanical Engineering with a thesis investigating methods for intelligent precision machining operations using serial manipulators. His passion for robotics and applied AI emerged during the course of his undergraduate studies. To further the experience, he spent two semesters at Advanced Intelligent Robots Lab in Taiwan as a Visiting Researcher. Later, He was awarded a fully funded Professors Scholarship to pursue master’s studies at the National Taiwan University of Science and Technology. His work in Taiwan introduced a novel model-based intelligent force/position compliance end-effector aimed to develop inexpensive precision machining technologies to further enable Industry 4.0 in SMEs. Many of his works are driven by his search for “intelligent” and “practical” solutions to modern-day problems.
About his CISC Research he says
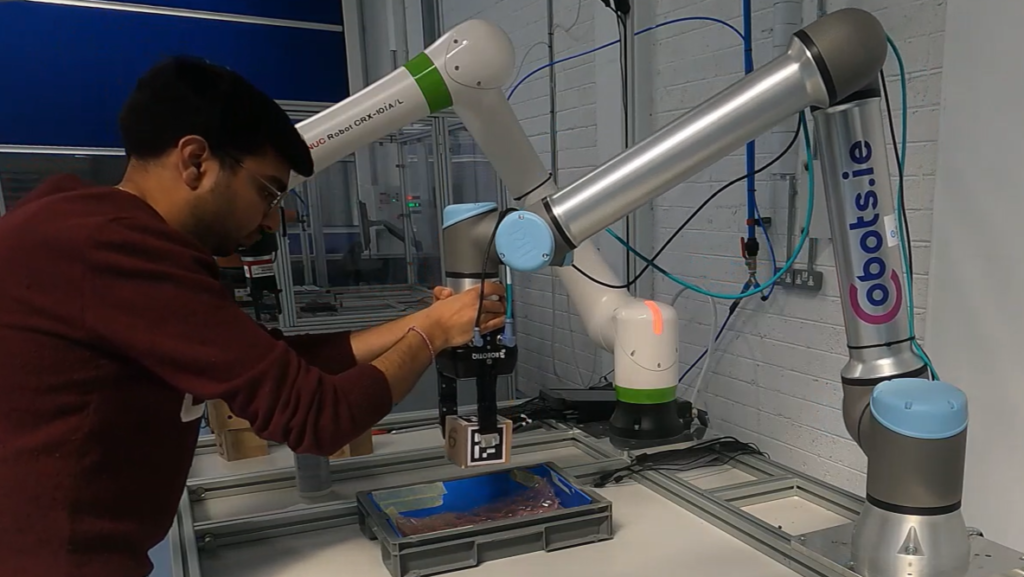
My research focus is on the use of imitation learning for simultaneous task and motion planning of complex manipulation jobs. The objective is to present a shared mental model where a human can not only teach a robot to perform a task but also can actively supervise and help system to recover from failure states. It will be a step forward to allow a non-expert to intuitively program robots on-the-go, without explicitly coding each detail, and reduce the task definition time for collaborative flexible assembly lines.
About his participation in ESREL2022 he says:
The 32nd European Conference on Safety and Reliability (ESREL 2022) held last week in Technological University Dublin. It was an absolute pleasure to present our position paper- “Evaluating Safety and Productivity Relationship in Human-Robot Collaboration”. The paper discusses about the prevailing safety and reliability limitations of human-robot collaboration (HRC), which are vital in risk-critical scenarios. And, despite recent advances, developing a safe collaborative robotic system for performing complex industrial or daily tasks remains a challenge. In this article, we reviewed the state of the art in reliable collaborative robotic work cells and proposed a refined reference model to combine influential factors such as robot autonomy, collaboration, and safety modes to redefine HRC categorization. Finally, we explained the relationship between autonomy and collaboration in terms of safety and productivity. As per the results, this relation motivates us to strive for the sweet spot somewhere in between the autonomy and collaboration rather than aiming for “lights out manufacturing”.
Achievements:
September 2022: ESREL PAPER Evaluating Safety and Productivity Relationship in Human-Robot Collaboration